
Overview
This is an implementation of a Path Tracing renderer, with core features of:
- BVH Acceleration of Ray-Primitive Intersection
- Lambertian BSDF Implementation & Cosine Hemisphere Importance Sampler
- Direct Lighting by Importance Sampling Lights
- Global Illumination Algorithm
- Adaptive Pixel Sampling
Part 1: Ray-Scene Intersection
Ray Generation
First, we generate rays in camera space. We make the following definitions:
- Screen Space: \([0, W-1] \times [0, H-1]\)
- Image Space with Normalized Coordinates: \([0, 1] \times [0, 1]\)
- Camera Space: \([-\tan(\frac{1}{2}hFoV), \tan(\frac{1}{2}hFoV)] \times [-\tan(\frac{1}{2}vFoV), \tan(\frac{1}{2}vFoV)] \times [-1, 1]\)
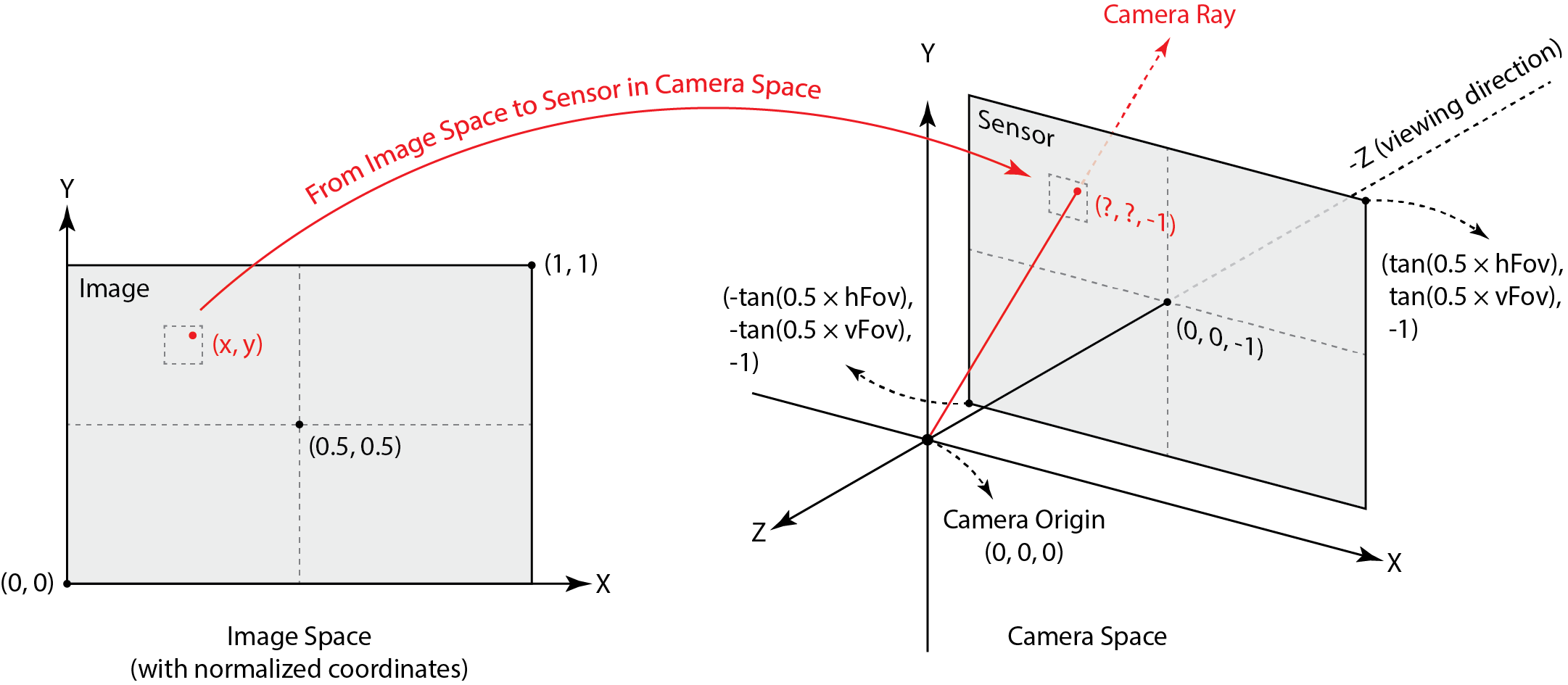
And we generate rays as follows:
- Select a pixel \(P_{\text{screen}} = [x +
rx, y + ry]\) in screen space, where:
- \(x \in [0, W-1], y \in [0, H-1]\)
- \(rx \sim \mathcal{U}(0, 1), ry \sim \mathcal{U}(0, 1)\)
- Transform \(P_{\text{screen}}\) to
pixel \(P_\text{img}\) in image space,
where:
- \(P_{\text{img}} = \left[ \frac{P_{\text{screen}}.x}{W}, \frac{P_{\text{screen}}.y}{H} \right]\)
- Transform \(P_\text{img}\) to
camera space, where:
- \(P_{\text{cam}} = [2\tan(\frac{hFov}{2})( P_{\text{img}}.x - 0.5), \quad2 \tan (\frac{vFoV}{2}) (P_{\text{img}}.y - 0.5), \quad -1]\)
- Generate ray \(r\), where:
ray.origin = Vector3D(0, 0, 0)ray.direction = P_cam.unit()
Ray-Triangle Intersection (3D)
First, we want to know if a ray, defined as \(o+td\), has intersection with a plane,
defined as \(N \cdot (P - P_0) = 0\).
The formula is: \[
t = \frac{(\mathbf{P_0} - \mathbf{O}) \cdot \mathbf{N}}{\mathbf{D} \cdot
\mathbf{N}}
\] Thus if ray.min_t <= t <= ray.max_t, there
is an intersection with the plane.
Second, we want to know if the intersection is inside the triangle. This can be verified by barycentric coordinates, which is calculated by formula as follows: \[ p = a v_1 + b v_2 + c v_3 \]
\[ \Rightarrow \begin{cases} p \cdot v_1 = a (v_1 \cdot v_1) + b (v_2 \cdot v_1) + c (v_3 \cdot v_1) \\ p \cdot v_2 = a (v_1 \cdot v_2) + b (v_2 \cdot v_2) + c (v_3 \cdot v_2) \\ p \cdot v_3 = a (v_1 \cdot v_3) + b (v_2 \cdot v_3) + c (v_3 \cdot v_3) \end{cases} \]
This is: \[ \begin{bmatrix} v_1 \cdot v_1 & v_2 \cdot v_1 & v_3 \cdot v_1 \\ v_1 \cdot v_2 & v_2 \cdot v_2 & v_3 \cdot v_2 \\ v_1 \cdot v_3 & v_2 \cdot v_3 & v_3 \cdot v_3 \end{bmatrix} \begin{bmatrix} a \\ b \\ c \end{bmatrix} = \begin{bmatrix} p \cdot v_1 \\ p \cdot v_2 \\ p \cdot v_3 \end{bmatrix} \] Which has a closed form solution. If \(0 \le a, b, c \le 1\), the intersection on the plane is in the triangle.
Remark: This method avoids calculating determinant of triangle, which may introduce det=0 cases and needs special if branches. Hence, this method is more effective and numerically stable. (The left 3x3 matrix is always invertible.)
Ray-Sphere Intersection (3D)
Suppose our ray is defined as \(o+td\), while sphere is defined as \(\| P - c \|^2 = r^2\). The intersection
formula is: \[
\begin{cases}
t_1 = \frac{-b - \sqrt{\Delta}}{2a} \quad \text{(smaller intersection)}
\\
t_2 = \frac{-b + \sqrt{\Delta}}{2a} \quad \text{(larger intersection)}
\end{cases}
\] where: \[
\begin{cases}
a = \|\mathbf{d}\|^2 \\
b = 2 (\mathbf{o} - \mathbf{c}) \cdot \mathbf{d} \\
c = \| \mathbf{o} - \mathbf{c} \|^2 - r^2 \\
\Delta = b^2 - 4ac
\end{cases}
\] Hence if
(ray.min_t <= t1 <= ray.max_t) || (ray.min_t <= t2 <= ray.max_t),
there is intersection. And we always take the smaller intersection
point.
Result Gallery
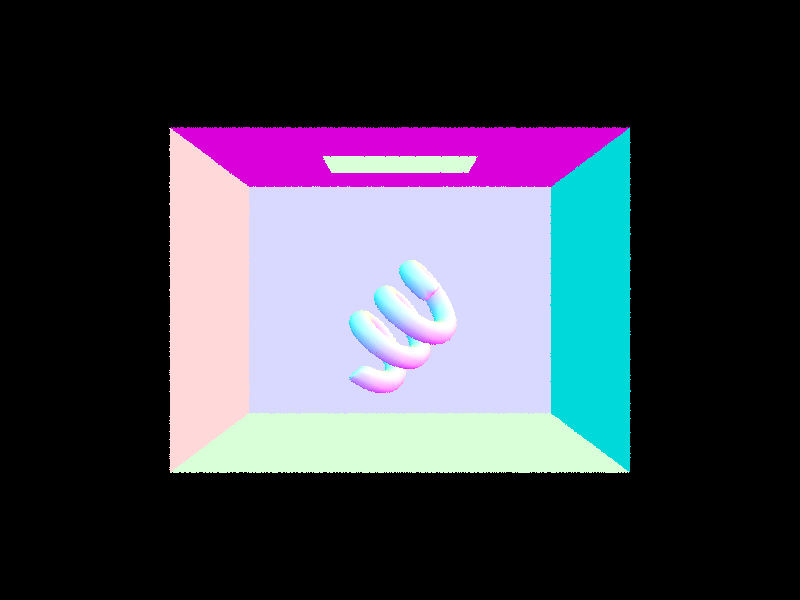
A coil inside a Cornell Box, rendered with normal shading.
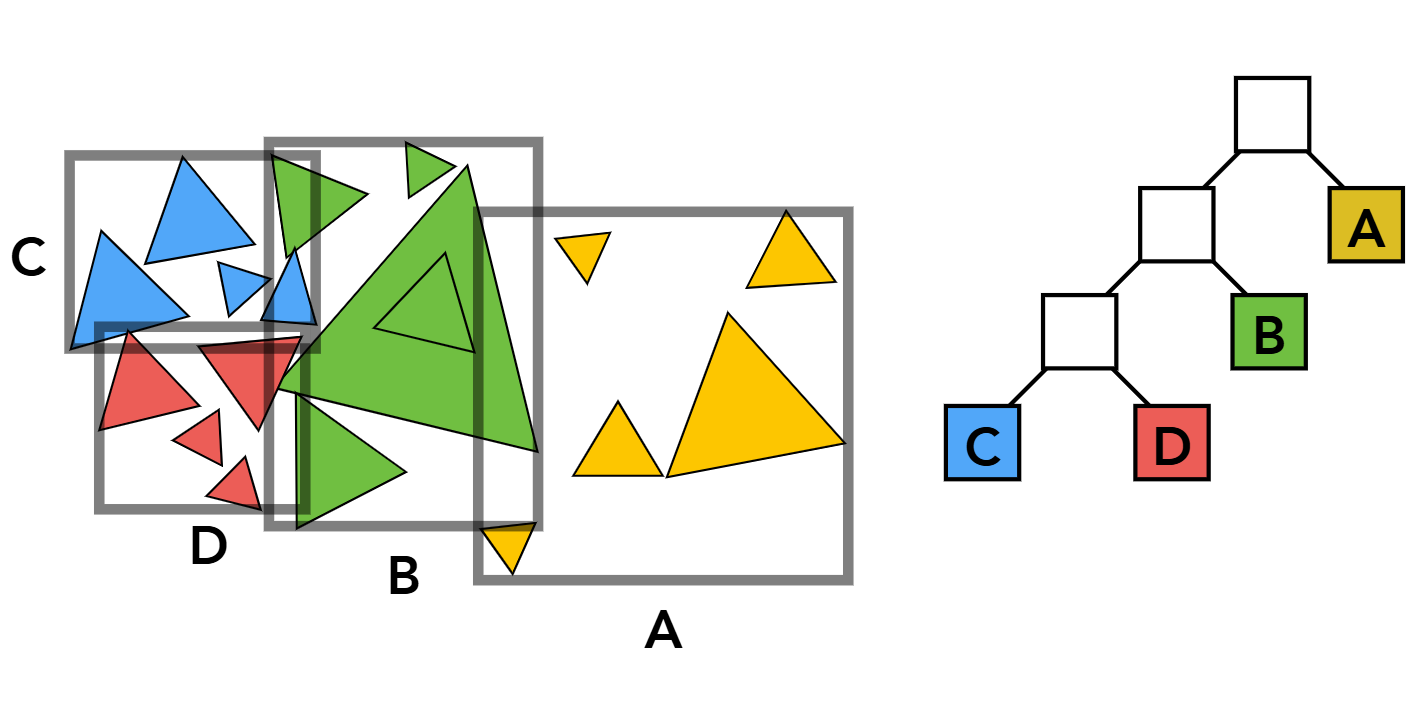
Part 2: Bounding Volume Hierarchy
Default rendering process requires ray-primitive intersection test for each primitive and each ray. Suppose we have \(R\) rays and \(P\) primitives, this is \(\mathcal{O}(R*P)\) complexity. To speed it up, we build hierarchy in primitives and reduce the complexity to \(\mathcal{O} (R * \log P)\).
Building BVH Node
The algorithm is as follows:
Function
Construct_BVHbuilds BVH Node of all primitives in[start, end).
Requires primitive iteratorstart, end; integermax_leaf_size:Initialize current BVH Node
nodeusing a bounding box of all primitives inprimitive[start, end].Check if we need to stop constructing. If
end - start <= max_leaf_size:- Let
node->start = start,node->end = end. - Return
node.
- Let
Otherwise, we want to keep splitting.
First, select pivot using heuristic
pivot_axis = argmax(bbox.extent).Second, we divide the vector into left & right subparts, while the pivot element is the median value on
pivot_axis.1
2
3
4
5auto comp = [&pivot_axis](const Primitive* a, const Primitive* b)
{ return a->get_bbox().centroid()[pivot_axis] <
b->get_bbox().centroid()[pivot_axis]; };
auto pivot_pos = start + (end - start) / 2;
std::nth_element(start, pivot_pos, end, comp);Generate left & right nodes recursively, i.e.
1
2node->l = construct_bvh(start, pivot_pos + 1, max_leaf_size);
node->r = construct_bvh(pivot_pos + 1, end, max_leaf_size);
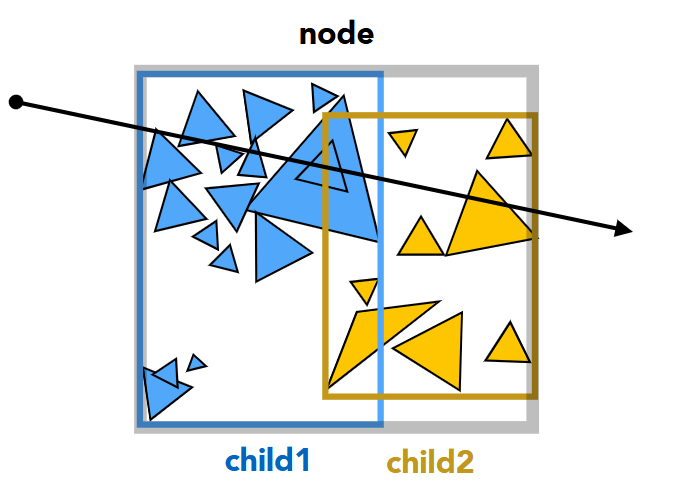
Ray-BVH Intersection
The algorithm is as follows:
Function
intersecttests whether a givenrayintersects any primitive within a BVH node.
Requiresray(input ray),i(pointer to intersection record),node(current BVH node).Compute the intersection of the ray with the node's bounding box.
- Initialize
temp_tmin,temp_tmaxfor storing intersection intervals. - If the ray does not intersect the bounding box,
return
false.
- Initialize
If
nodeis not a leaf, we must check both child nodes.- Recursively test intersection with the left child node.
- Recursively test intersection with the right child node.
- Return
trueif either child node is hit.
Otherwise, if
nodeis a leaf, we must check individual primitives.- Iterate through all primitives in
[node->start, node->end). - For each primitive:
- Increase
total_isects(for counting intersections). - Update
hitif an intersection occurs.
- Increase
- Return
hit, indicating whether the ray intersects any primitive in the leaf node.
- Iterate through all primitives in
Result Gallery
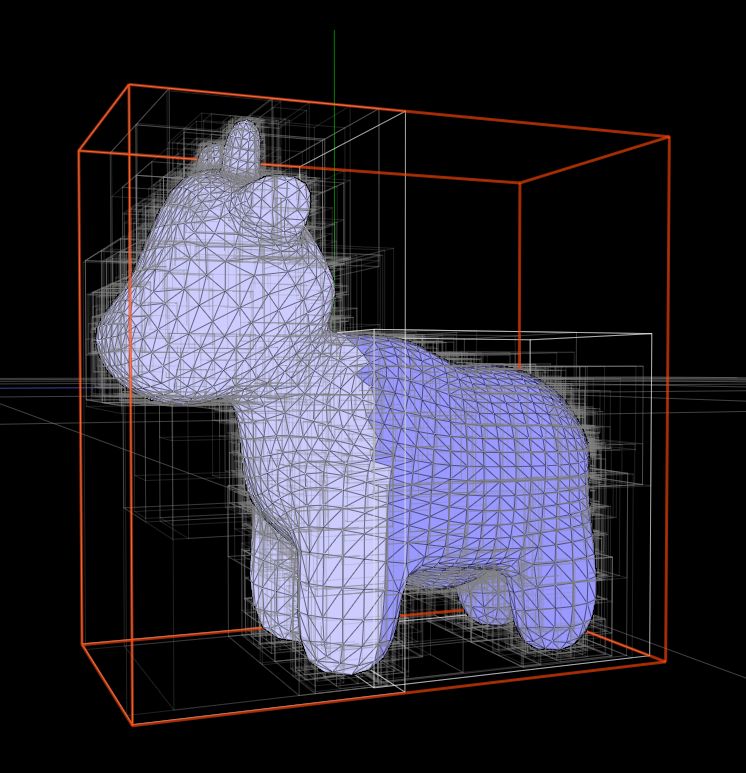
A cow, divided into BVH nodes.

|
|
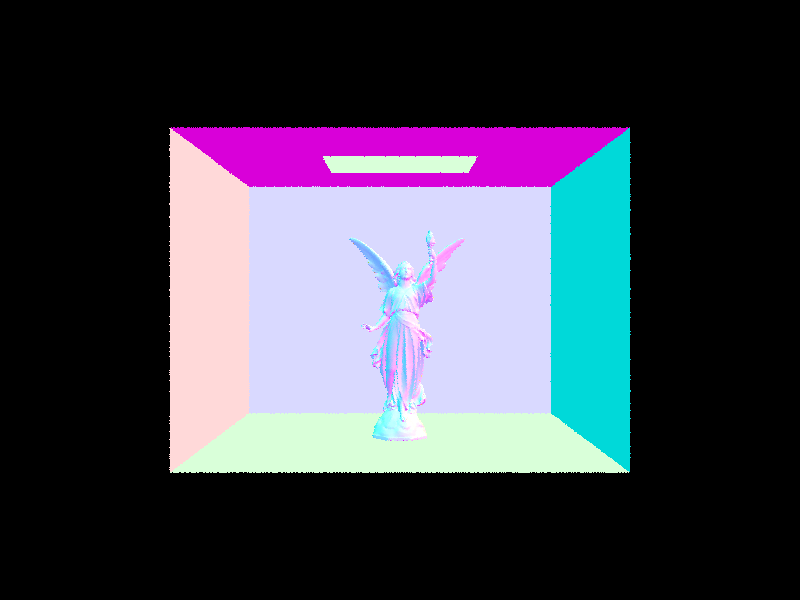
A cow (left) and a lucy statue in a Cornell Box (right), rendered with BVH acceleration and normal shading.
| BVH | Vallina | #Primitives | Rel. Speed | |
|---|---|---|---|---|
| cow | 0.1823s | 21.1210s | 5856 faces | 115.85x faster |
| lucy | 0.2515s | 826.8349s | 133796 faces | 3287.6139x faster |
Performance comparison. As we can see, with more #primitives, the difference in rendering time is bigger, due to the \(\log\) difference in algorithm complexity. For image lucy, it is almost not intractable to render without BVH acceleration, since our current renderer hasn't introduced lighting yet.
Part 3: Direct Illumination
The Lambertian BSDF
We will derive the Lambertian reflectance BSDF, which is a uniform matte texture, as follows:
We assume that the BSDF \(f_r(p, w_i \rightarrow w_o)\) is constant \(C\) for all incident and outgoing directions.
The outgoing radiance at a point \(p\) in direction direction \(\omega_o\) is given by the reflection equation: \[ L_r(p, \omega_o) = \int_{H^2} f_r(p, \omega_i \to \omega_o) L_i(p, \omega_i) \cos\theta_i d\omega_i \] Since we assume that \(f_r\) is constant, we can take it out of the integral: \[ L_r(p, \omega_o) = f_r \int_{H^2} L_i(p, \omega_i) \cos\theta_i d\omega_i \] The integral represents the irradiance \(E_i\) at \(p\), so we rewrite it as: \[ L_r(p, \omega_o) = f_r E_i \]
By the definition of reflectance (also called albedo), the fraction of incident energy that is reflected is: \[ \frac{L_r(p, \omega_o)}{E_i} = \text{Reflectance} \] Substituting \(L_r(p, \omega_o) = f_r E_i\), we have: \[ f_r = \frac{\text{Reflectance}}{\pi} \] This is the BSDF of Lambertian reflectance model.
Direct Lighting Calculation (Hemisphere Sampling)
The algorithm is as follows:
Function
estimate_direct_lighting_hemisphereestimates direct lighting at an intersection point using hemisphere sampling.- Requires:
Ray r,Intersection isect.
- Returns: Estimated direct lighting
L_out.
- Requires:
Construct a Local Coordinate System
- Align the normal \(N\) of the intersection point with the Z-axis.
- Compute the object-to-world transformation matrix
o2wand its transposew2o. - Define
w_in_objspace,w_out_objspace,w_in_world,w_out_world
Sample the Hemisphere
- Set number of samples proportional to the number of scene lights and area light samples.
- For each sample:
- Sample the BSDF to generate an incoming direction
w_in_objspaceand its pdf. - Construct a shadow ray from the hit point along the sampled direction.
- Check for occlusion:
- If the shadow ray hits another object, retrieve the emitted radiance \(L_{\text{in}}\).
- Accumulate contribution: \[ L_{\text{out}} := L_{\text{out}} + f_r \cdot L_{\text{in}} \cdot \cos\theta / \text{pdf} \]
- Sample the BSDF to generate an incoming direction
Normalize by Sample Count by dividing
L_outby the total number of samples.Return the Estimated Radiance
L_out.
Result Gallery: Uniform Hemisphere Sampling
|
|
|
|
| #samples/light ray: 1 | #samples/light ray: 4 | #samples/light ray: 16 | #samples/light ray: 64 |
Importance Sampling on Lambertian Materials
We will prove that using cosine sampling on Lambertian Materials is better than uniform sampling.
Monte Carlo Integration Variance Formula:
\[ \text{Var}(I) = \frac{1}{N} \text{Var} \left(\frac{f}{p} \right) \] where $ f $ is the function and $ p $ is the sampling PDF.For Uniform Sampling:
- The PDF \(p = \frac{1}{\pi}\) (uniform over the hemisphere).
- The function to integrate: \[ f = \text{reflectance} \cdot \cos\theta \].
- Importance ratio:
\[ \frac{f}{p} = 2 \cdot \text{reflectance} \cdot \cos\theta \] - Variance is nonzero due to \(\cos\theta\) fluctuations.
For Cosine Sampling:
- The PDF $ p = $ (proportional to Lambertian reflectance).
- Importance ratio:
\[ \frac{f}{p} = \text{reflectance} \] - Variance is zero because $ f/p $ is constant.
Conclusion:
- Cosine-weighted sampling perfectly cancels out the $ $ term, reducing variance to zero.
- Uniform sampling has unnecessary variance, making it less efficient for rendering Lambertian surfaces.
- Cosine sampling converges faster with fewer samples, improving efficiency in Monte Carlo integration.
Difference in code implementation of
DiffuseBSDF::sample_fUniform Sampling:
1
2
3*wi = UniformHemisphereSampler3D().get_sample();
*pdf = 1 / (2 * PI);
return f(wo, *wi) * 2 * cos_theta(*wi);Cosine Sampling:
1
2
3*wi = CosineWeightedHemisphereSampler3D().get_sample();
*pdf = cos_theta(*wi) / PI;
return f(wo, *wi);
Direct Lighting Calculation (Importance Sampling)
The algorithm is as follows:
Function
estimate_direct_lighting_importanceestimates direct lighting at an intersection point using importance sampling.- Requires:
Ray r,Intersection isect. - Returns: Estimated direct lighting
L_out.
- Requires:
Construct a Local Coordinate System... (omitted, same as above.)
Sample the Lights Using Importance Sampling
- Iterate over all light sources in the scene.
- For each light:
- Sample the light source to generate an incoming direction
w_in_world, its pdf, and the emitted radiance $ L_{} $. - Transform
w_in_worldinto object space to getw_in_objspace. - Construct a shadow ray from the hit point along the sampled direction.
- Check for occlusion:
- If the shadow ray does not hit an occluder:
- Compute the BSDF value $ f_r $.
- Accumulate contribution: \[ L_{\text{out}} := L_{\text{out}} + f_r \cdot L_{\text{in}} \cdot \cos\theta / \text{pdf} \]
- If the shadow ray does not hit an occluder:
- Sample the light source to generate an incoming direction
Return the Estimated Radiance
L_out
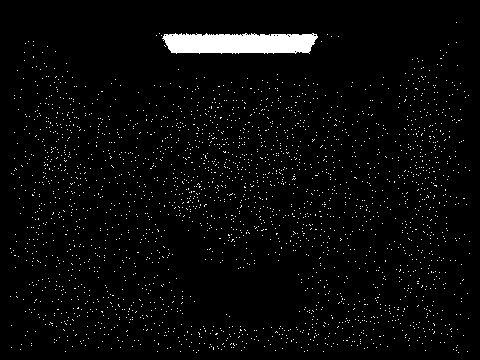
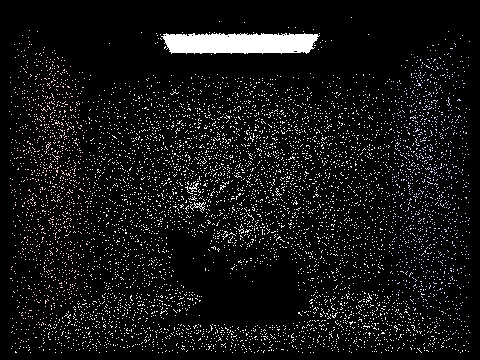
Result Gallery: Importance Sampling
| Hemisphere Sampling | |||
|---|---|---|---|
|
|
|
|
|
| #samples/light ray: 1 | #samples/light ray: 4 | #samples/light ray: 16 | #samples/light ray: 64 |
| Importance Sampling | |||
|
|
|
|
| #samples/light ray: 1 | #samples/light ray: 4 | #samples/light ray: 16 | #samples/light ray: 64 |
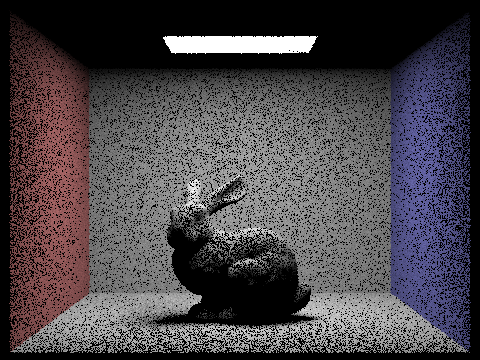
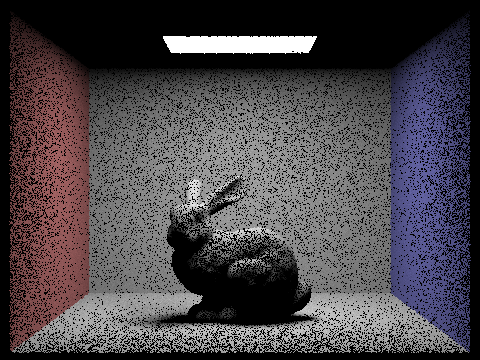
In comparison, using importance sampling makes convergence much faster than direct uniform sampling. Even if we only sample ONCE per light ray, importance sampling can still generate reasonable results, while uniform sampling can almost see nothing in the image. Remark: we use one sample per pixel for all results here.
Part 4: Global Illumination
Recursive Path Tracing (Fixed N-Bounces)
The algorithm is as follows:
Function
at_least_one_bounce_radiance_nbouncecomputes radiance at an intersection by recursively tracing multiple bounces.- Requires:
Ray r,Intersection isect. - Returns: Estimated radiance
L_out.
- Requires:
Check for Maximum Depth
- If
r.depth >= max_ray_depth, return the one-bounce radiance and terminate recursion.
- If
Construct a Local Coordinate System... (omitted, same as above)
Sample the BSDF to Generate a New Ray
- Sample an incoming direction
w_in_objspaceusing the BSDF and compute its probability density (pdf). - Construct a new ray
r_newfrom the intersection point alongw_in_wspace, with an incremented depth.
- Sample an incoming direction
Check for Intersection with the New Ray
- If
r_newdoes not hit any object, return one-bounce radiance and terminate recursion.
- If
Compute Radiance Based on Bounce Accumulation Mode
- If
isAccumBouncesis enabled:- Return one-bounce radiance plus recursively computed indirect radiance if depth limit is not reached.
- Otherwise (only indirect light contribution):
- Return only the recursively computed indirect radiance beyond the first bounce.
- If
Final Radiance Contribution
- The accumulated radiance is computed as: \[ L_{\text{out}} := f_r \cdot L_{\text{rec}} \cdot \cos\theta / \text{pdf} \]
- If
isAccumBouncesis enabled, direct illumination is added; otherwise, only indirect illumination is computed.
Return the Estimated Radiance
L_out
Recursive Path Tracing (Russian Roulette Termination)
The algorithm is as follows:
Function
at_least_one_bounce_radiance_rrcomputes radiance at an intersection using Russian Roulette termination for efficiency.- Requires:
Ray r,Intersection isect. - Returns: Estimated radiance
L_out.
- Requires:
Apply Russian Roulette Termination
- With probability $ 1 - P_{} $, terminate recursion and return one-bounce radiance.
Construct a Local Coordinate System... (omitted, same as above)
Sample the BSDF to Generate a New Ray... (omitted, same as above)
Check for Intersection with the New Ray... (omitted, same as above)
Compute Radiance Based on Bounce Accumulation Mode... (omitted, same as above)
Final Radiance Contribution
- The accumulated radiance is computed as: \[ L_{\text{out}} := f_r \cdot L_{\text{rec}} \cdot \cos\theta / (\text{pdf} \cdot P_{\text{RR}}) \]
- Russian Roulette termination ensures that only a subset of paths continue, but the contribution is unbiasedly scaled by dividing by $ P_{} $.
Return the Estimated Radiance
L_out
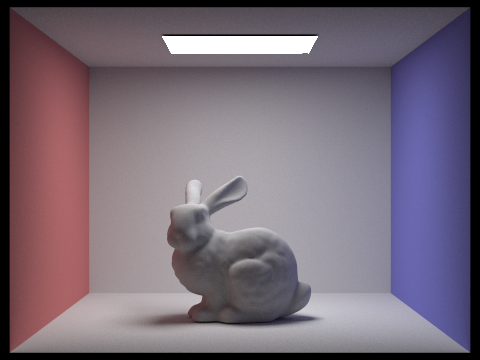
Result Gallery
|
|
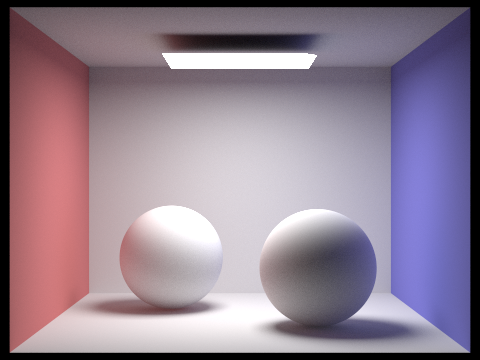
|
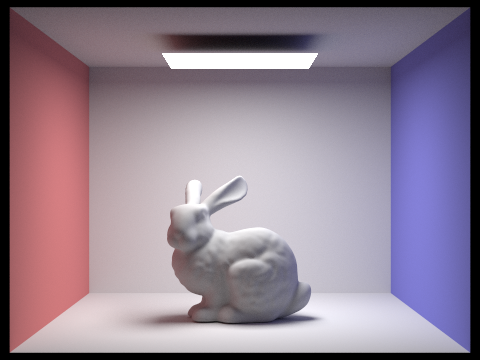
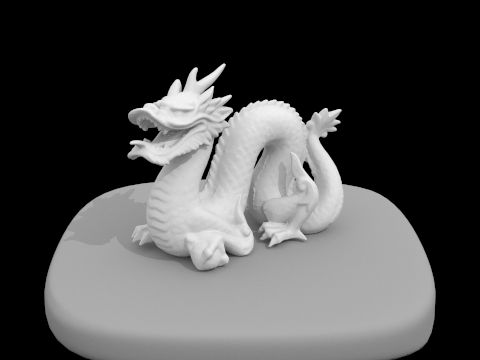
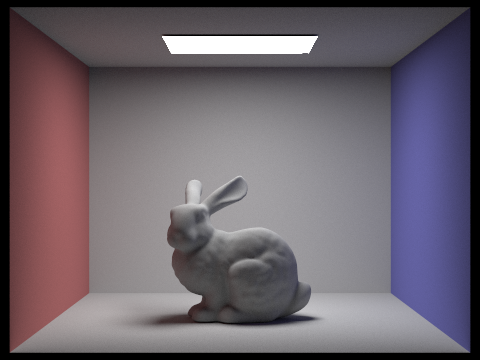
Some images, rendered with global illumination.
1024 samples / pixel, 4 samples / light ray, 5 bounces maximum.
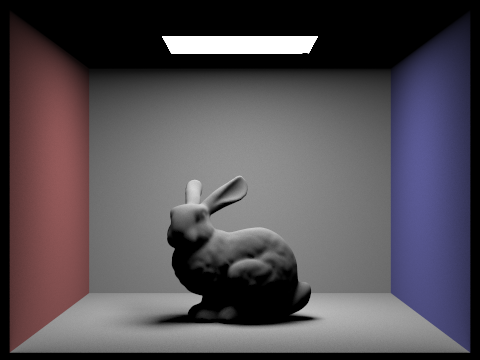
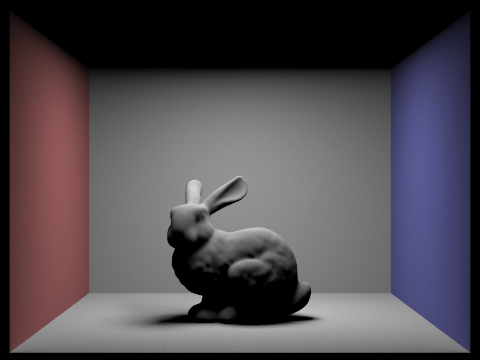
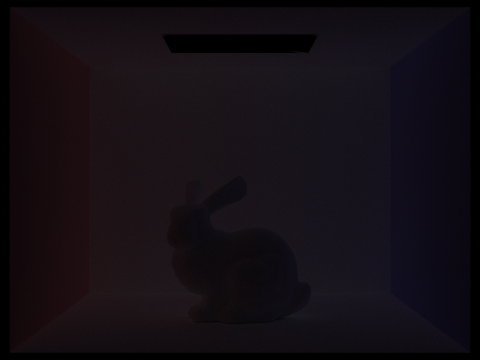
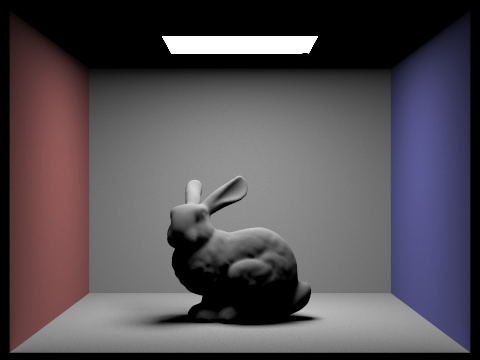
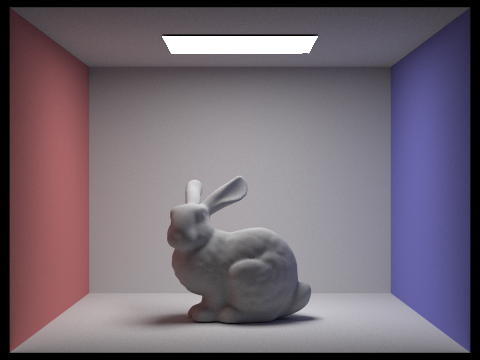
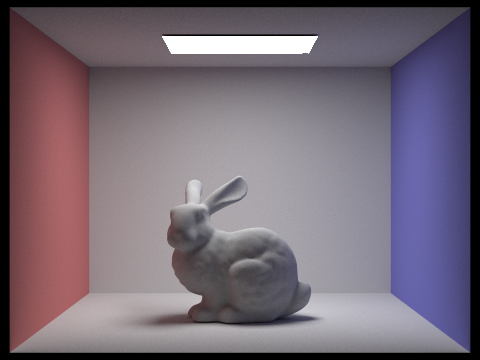
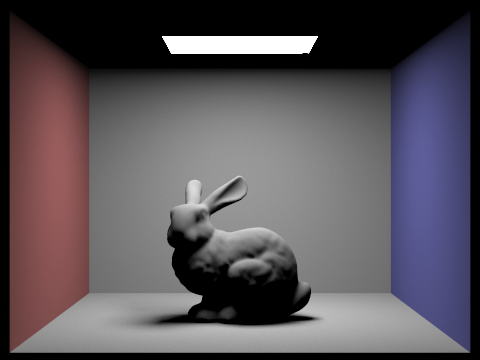
|
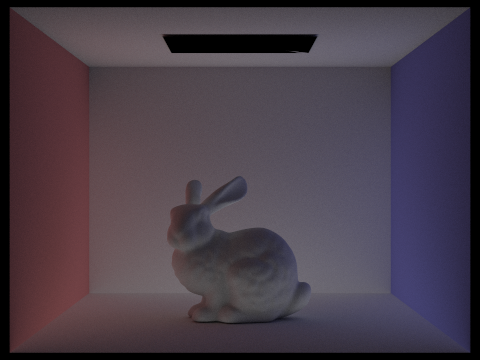
|
The bunny rendered with only direct lighting (left) and only indirect lighting (right)
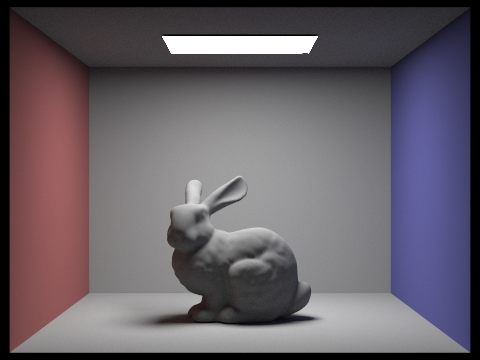
| Global Illumination | |||||
|---|---|---|---|---|---|
|
|
|
|
|
|
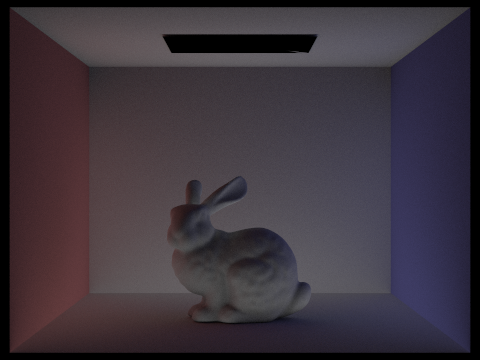
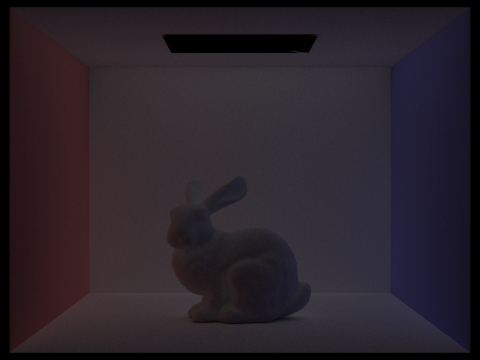
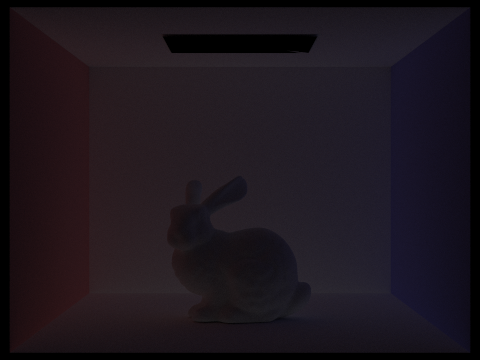
| nbounce = 0 | nbounce = 1 | nbounce = 2 | nbounce = 3 | nbounce = 4 | nbounce = 5 |
| Cumulative Global Illumination | |||||
|
|
|
|
|
|
| nbounce = 0 | nbounce = 1 | nbounce = 2 | nbounce = 3 | nbounce = 4 | nbounce = 5 |
The bunny rendered with mth bounces of light.
1024 samples per pixel, 4 samples per light, nbounces listed in the table.
As we can see, nbounce=2 contributes the "soft shadow" part, where the bottom part of the bunny is lit due to indirect lighting. Also, the left and right side has some red and blue separately, due to indirect lighting from both walls. As comparison, contribution from nbounce >= 3 is not very big afterwards. The box just look slightly brighter on corners, while more red/blue are emitted onto white surfaces.
| Russian Roulette (p=0.4) | |||||
|---|---|---|---|---|---|
|
|
|
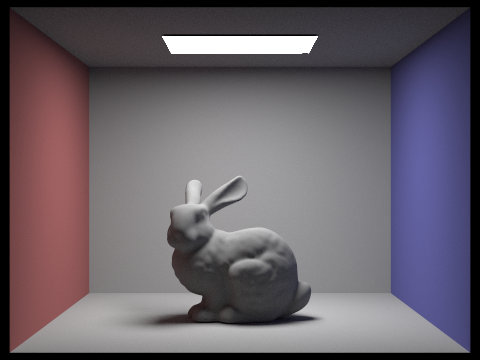
|
|
|
| max_bounce = 0 | max_bounce = 1 | max_bounce = 2 | max_bounce = 3 | max_bounce = 4 | max_bounce = 100 |
The bunny, rendered with Russian roulette.
1024 samples per pixel, 4 samples per light, nbounces listed in the table.
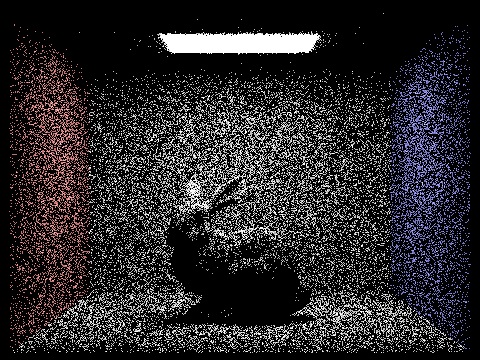
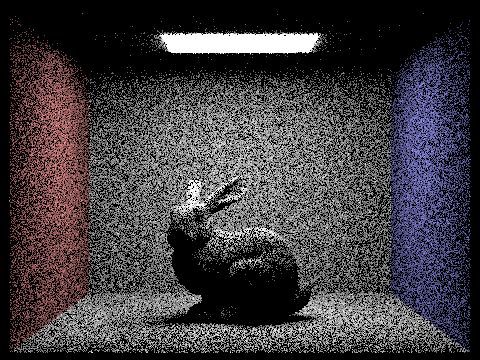
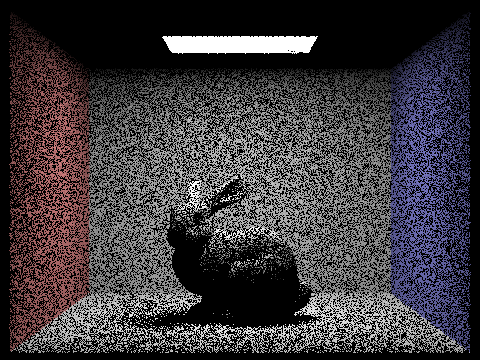
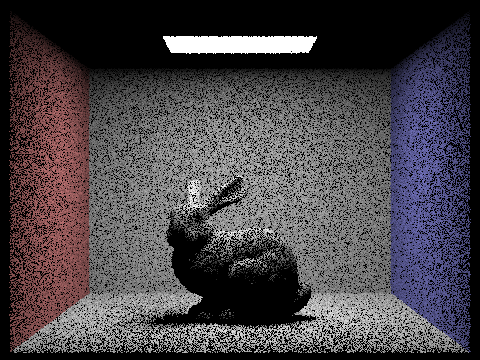
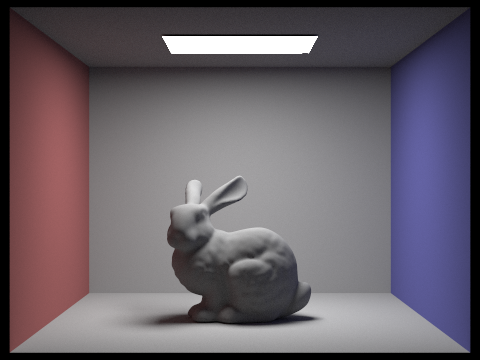
|
|
|
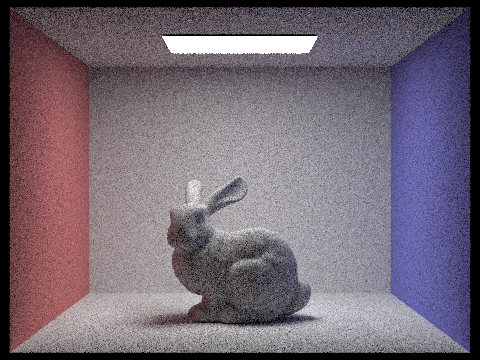
|
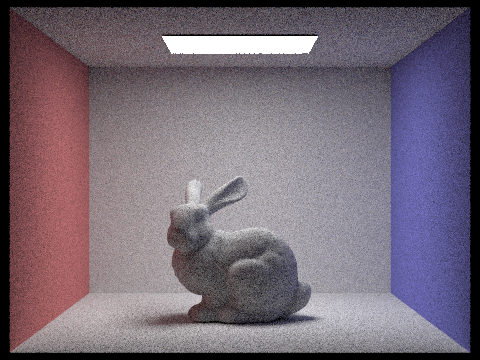
|
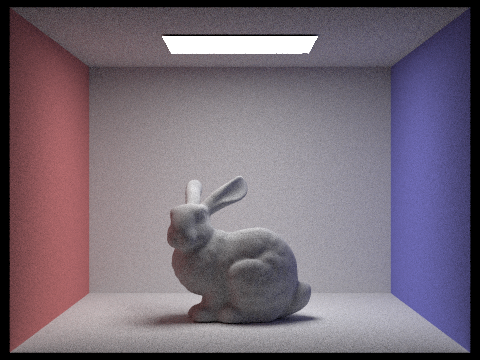
|
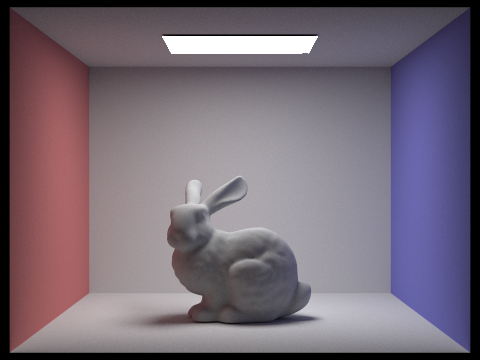
|
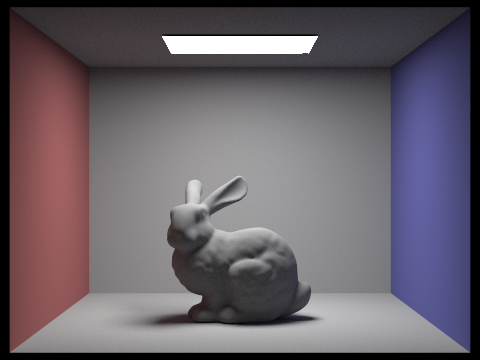
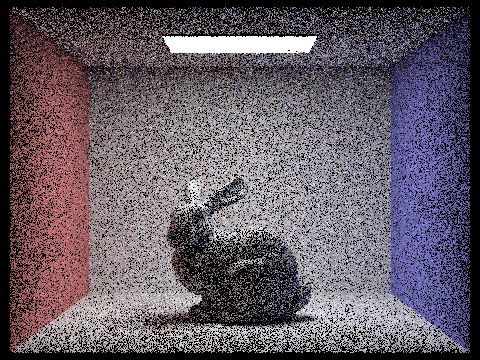
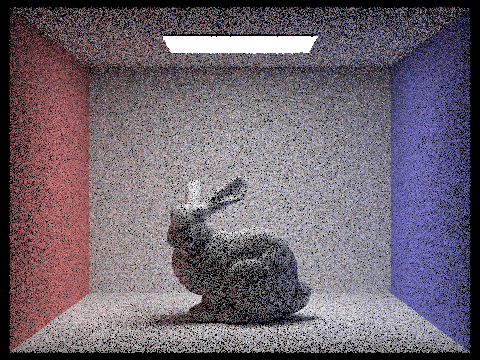
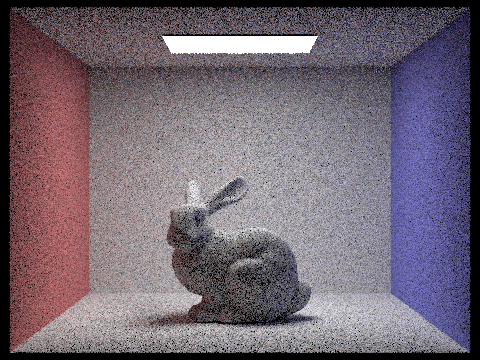
| 1 s/p | 2 s/p | 4 s/p | 8 s/p | 16 s/p | 64 s/p | 1024 s/p |
The bunny, rendered with different #samples/pixel. We use 4 samples/ray, nbounces=5.
Part 5: Adaptive Sampling
Adaptive Sampling Algorithm
We use adaptive sampling to boost efficiency, and reduce the noise in the rendered image. The algorithm is as follows:
Function
raytrace_pixel_adaptiveadaptively samples a pixel to achieve convergence efficiently.- Requires: Pixel coordinates
(x, y), max samplesns_aa, convergence thresholdmaxTolerance. - Returns: Final color for the pixel.
- Requires: Pixel coordinates
Initialize Sampling Variables
- Set
num_samplesto the maximum allowed samples. - Define
s1ands2to track the sum and squared sum of luminance values. - Set
sample_count = 0for tracking the actual number of samples taken. - Initialize
colorfor accumulating radiance estimates.
- Set
Iterative Sampling Process
- For each sample:
- Estimate radiance using
est_radiance_global_illumination(ray). - Accumulate the sampled radiance into
color. - Compute the luminance of the sample and update
s1ands2. - Increment
sample_count.
- Estimate radiance using
- For each sample:
Check for Convergence
- Every
samplesPerBatchiterations:- Compute the mean luminance:
\[ \mu = \frac{s1}{\text{sample_count}} \] - Compute the variance:
\[ \sigma^2 = \frac{s2 - \frac{s1^2}{\text{sample_count}}}{\text{sample_count} - 1} \] - Compute the confidence interval width:
\[ I = \frac{1.96 \cdot \sigma}{\sqrt{\text{sample_count}}} \] - If \(I \leq \text{maxTolerance} \cdot \mu\), stop sampling (pixel has converged).
- Compute the mean luminance:
- Every
Normalize the Final Color: Divide
colorbysample_countto get the final pixel value.Update Buffers
- Store the final pixel color in
sampleBuffer. - Store the actual number of samples taken in
sampleCountBuffer.
- Store the final pixel color in
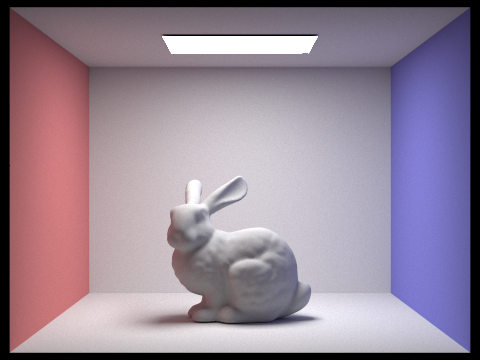
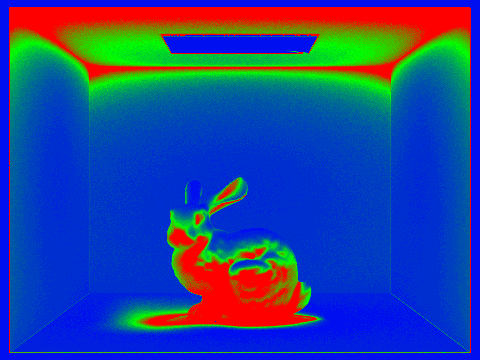
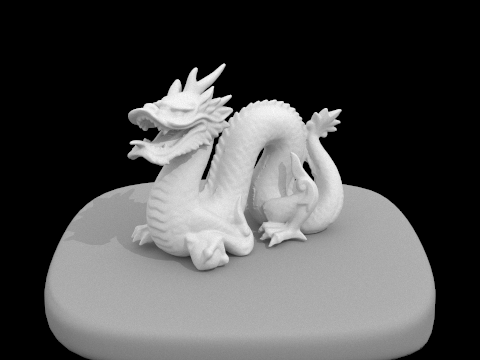
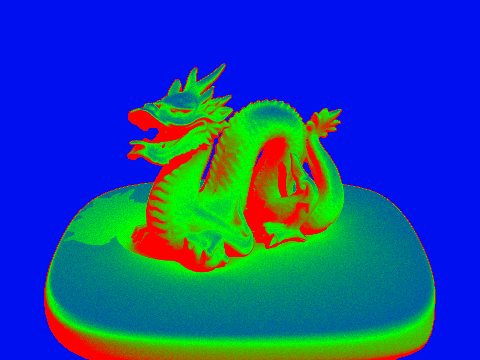
Result Gallery
|
|
|
|
The bunny (up) and dragon (down) rendered by adaptive sampling. The second column indicates sampling density, where red=higher, green=mdeium, blue=lowest. We use 2048 samples/pixel, 4 samples/ray, nbounces=5.